Tensegrity robots are a class of robot originally imagined at NASA in the early 2010’s as a robust platform for extraplanetary exploration. They combine rigid compressive elements with flexible tensile elements, giving them superior survivability.
Published in
- Soft Robotics (2021)
- Science Robotics (2018)
Specifications
This experimental design had several advantages
- All control hardware moved on-board (all prior fluidic tensegrities and most soft robots have off-board control hardware)
- In-situ 24 strain sensor network capable of detecting the robot shape in real-time (first of its kind among tensegrities)
- Neural network with 99% accuracy for detecting direction of gravity using strain sensor data alone
- Contact sensors for detecting collisions, 12 in all
The design also had several disadvantages
- Insufficient actuator displacement, approx. 24% strain
- Insufficient rest-state tension due to the high mass
- High mass, approximately 2kg.
The disadvantages led to the robot only being able to performed controlled rolling manuevers on a downward slope.
Despite the disadvantages, the robot was successful at demonstrating novel on-board sensing and closed-loop control
Design and fabrication
This particular robot was built entirely from scratch by me, Dylan Shah, and Olivier Cyr-Chronier. Significant technical advice was provided by Michelle Yuen and Jennifer Case. I was primarily responsible for the design of the majority of the robot, including
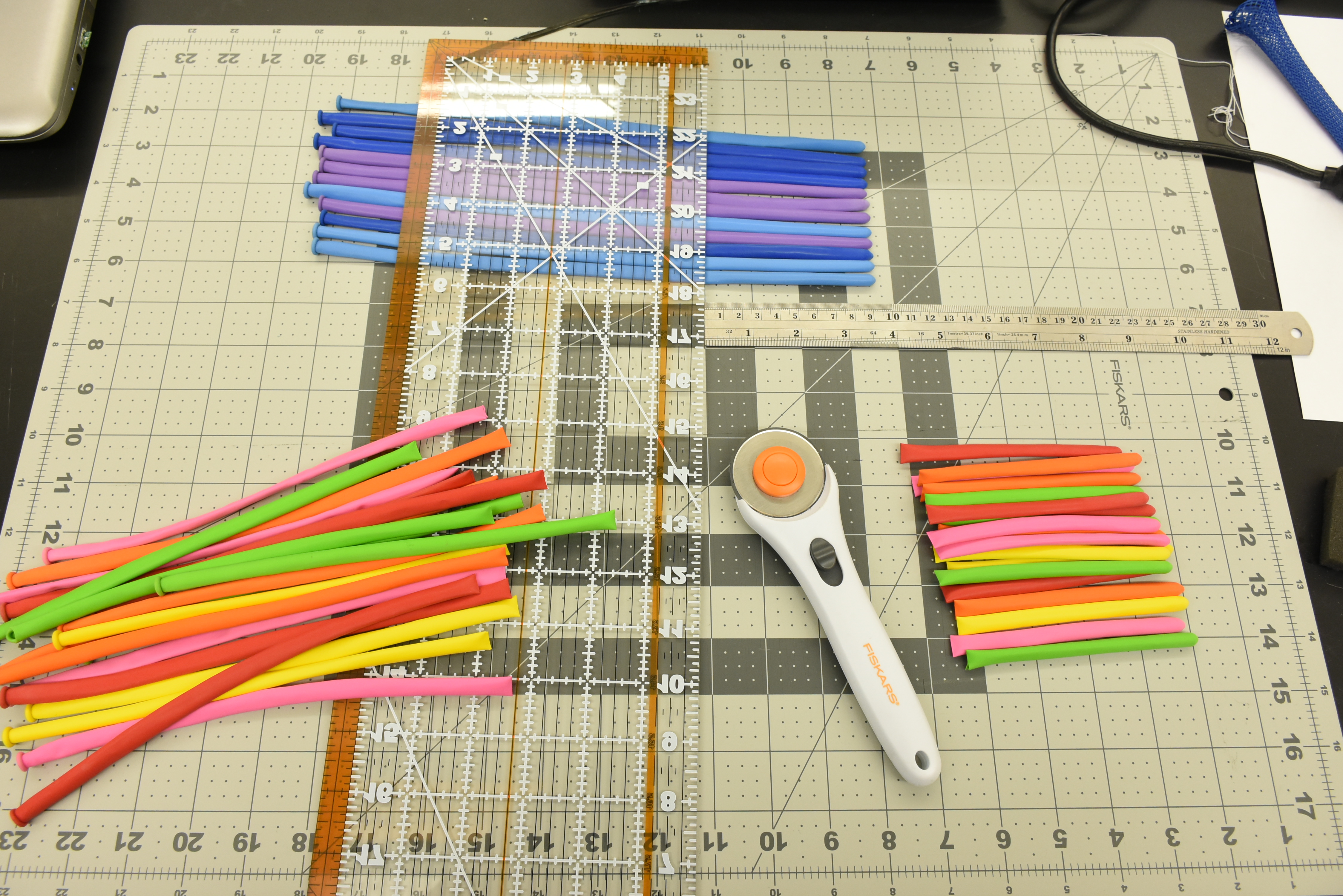
- McKibben pneumatic actuators


- Separable triangular skins and their connection points

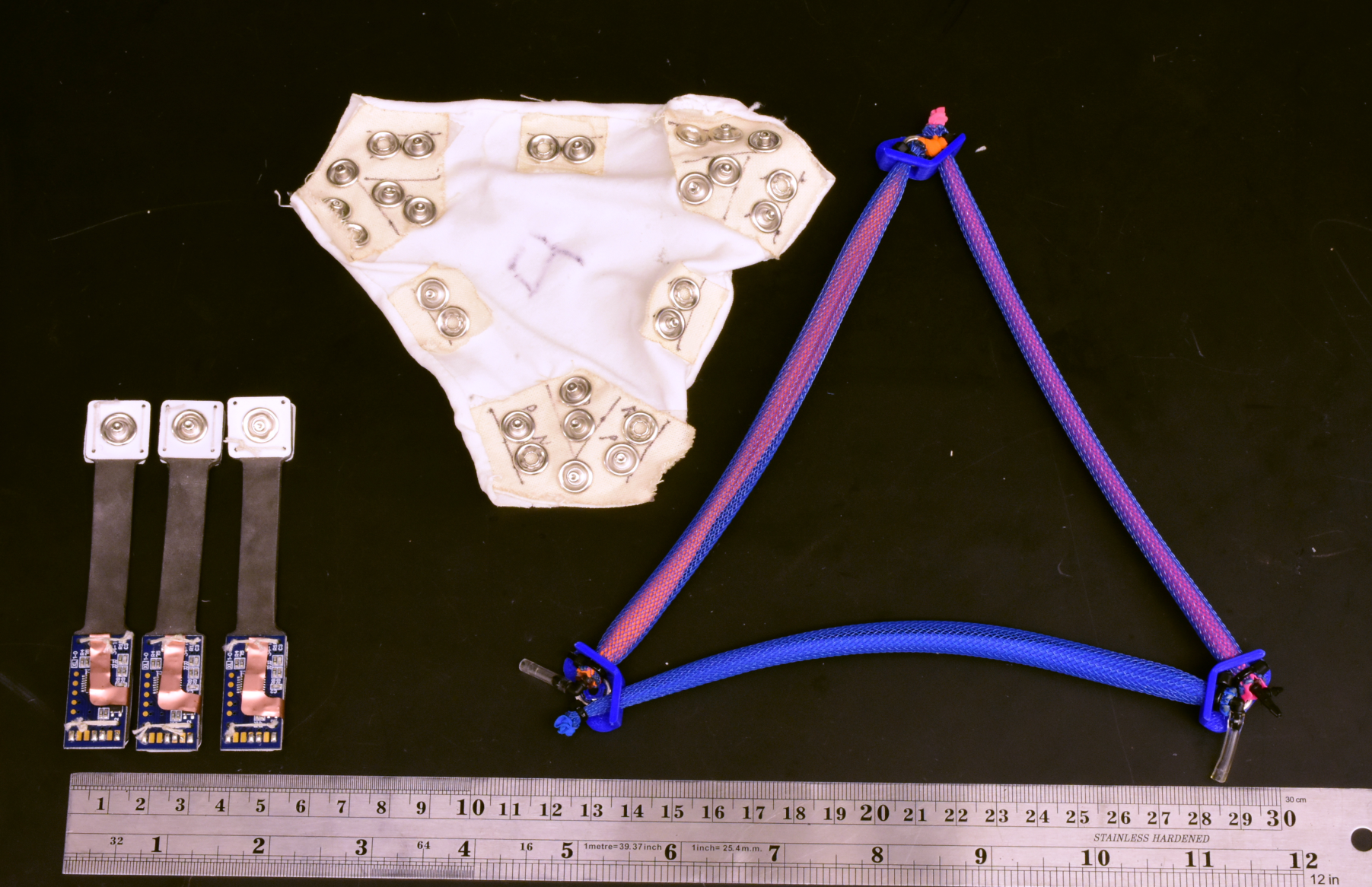
- Internal rod structure and end caps
- Pneumatic distribution system
- Distributed, valve manifold system
- i2c communication system and wiring harness
- Logic controller pseudocode (50/50 effort with Dylan)
- Plumbing configuration
- Tether design
- Distributed, valve manifold system

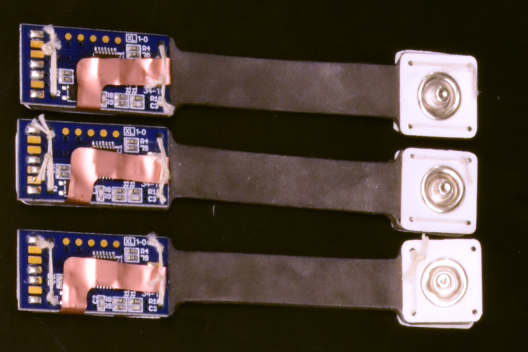
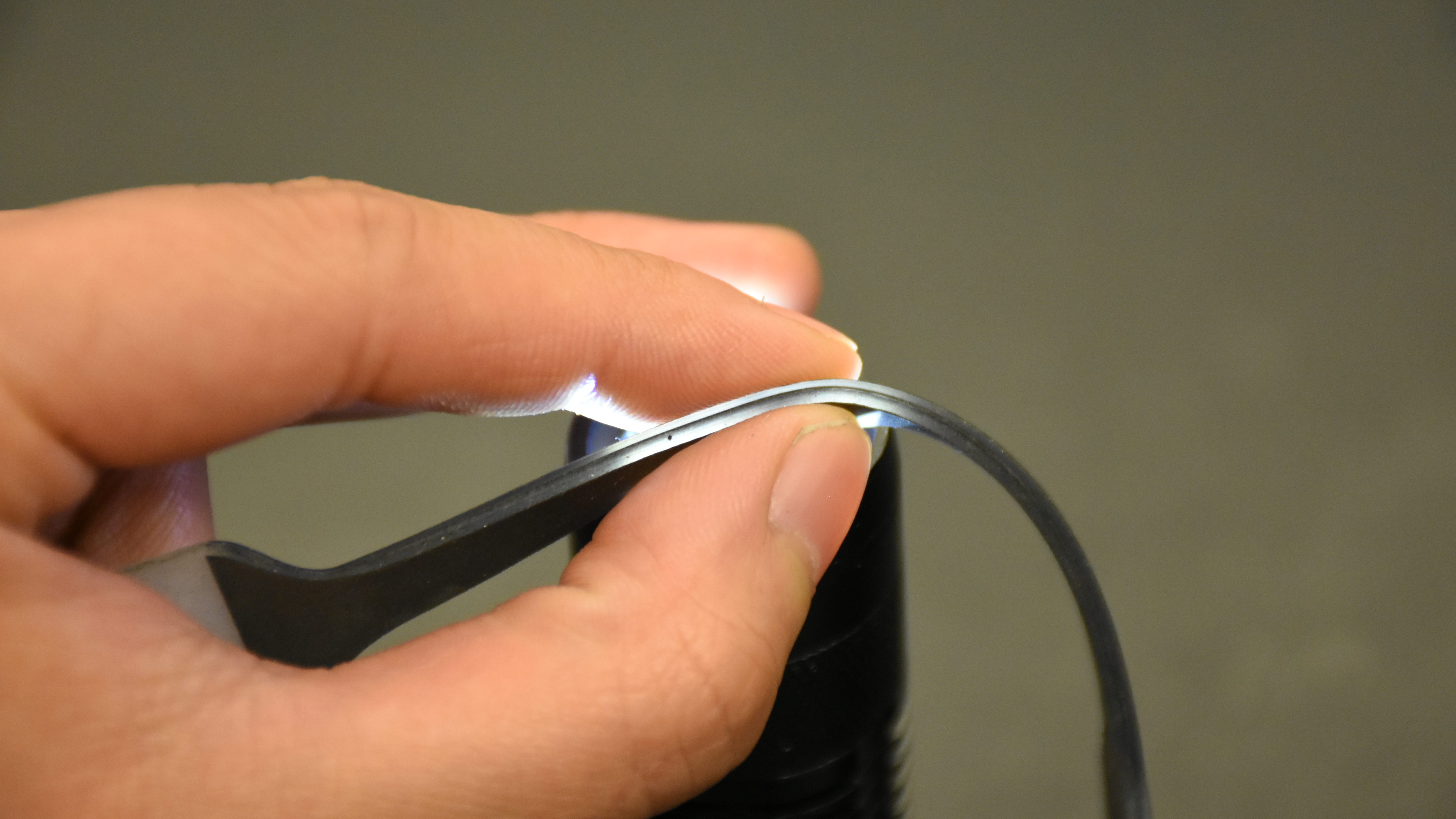
- Estensible elastomer capacitive sensors
- Five intercalcated graphite composite layers (external layers are grounded, reducing EM interference)
- Same-side conditioning board interface
- i2c communication system and wiring harness
- Basic control algorithms
- Motion primitives discovered using
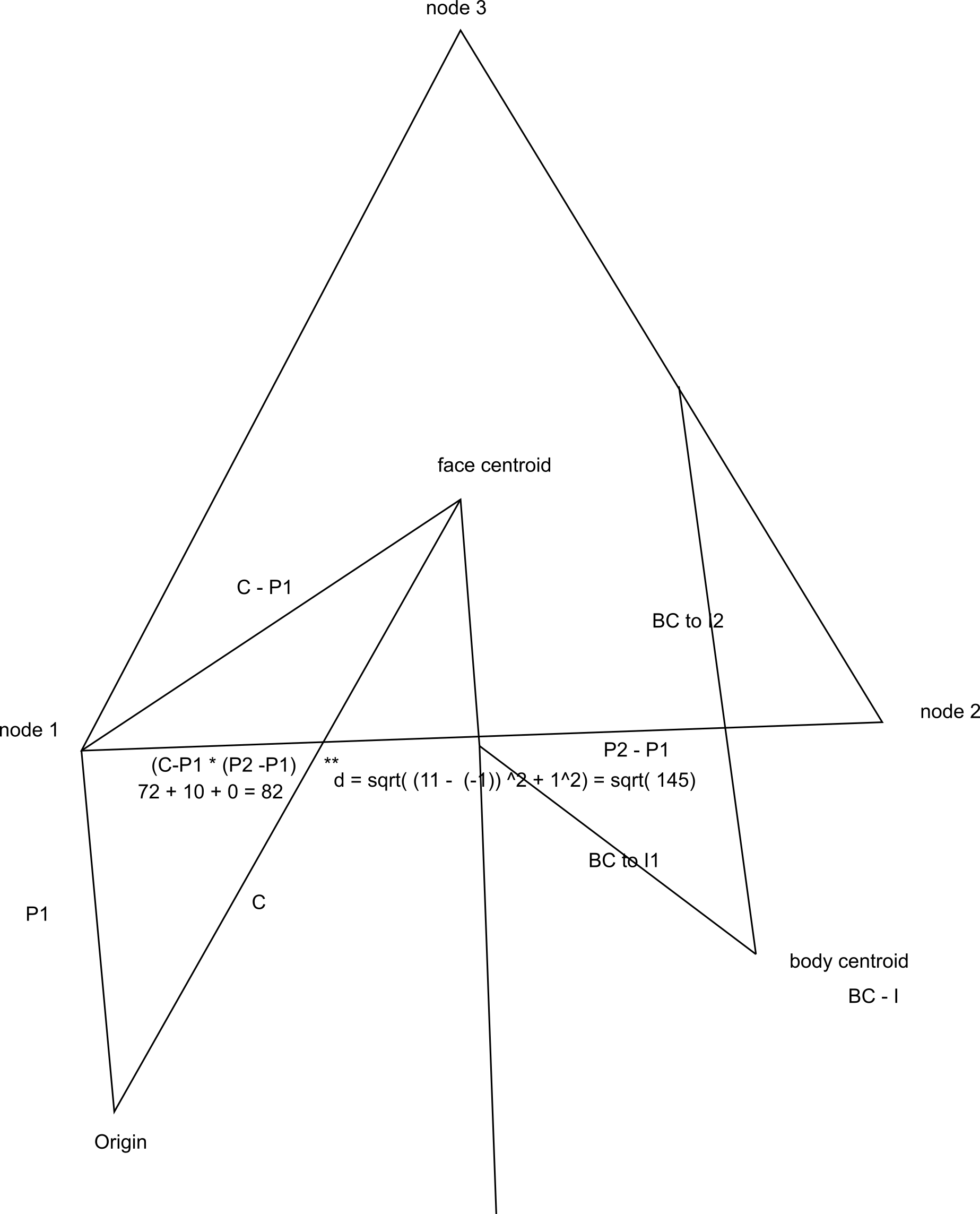
- 3D kinematic model of the robot based on a least-squares numerical solution (algorithm and initial pseudocode suggested by Jennifer Case)
- Genetic algorithm simulation of the tensegrity
- Motion primitives discovered using