Skip to content
Joran Booth, Ph.D. in Mech. Eng.
Publications
Work Experience
Awards / Organizations
Design ingenuity, innovation, and quality systems engineering design
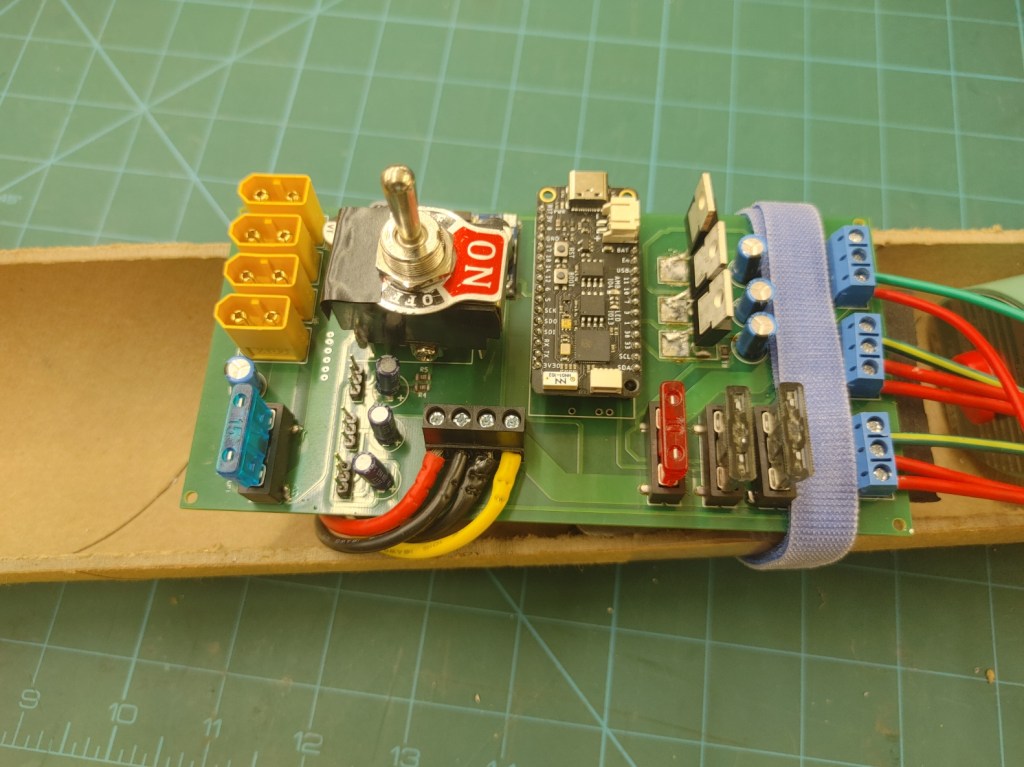
PCB for Rapid PID Tuning
Engineering
,
PCB design
,
Programming
,
Robotics
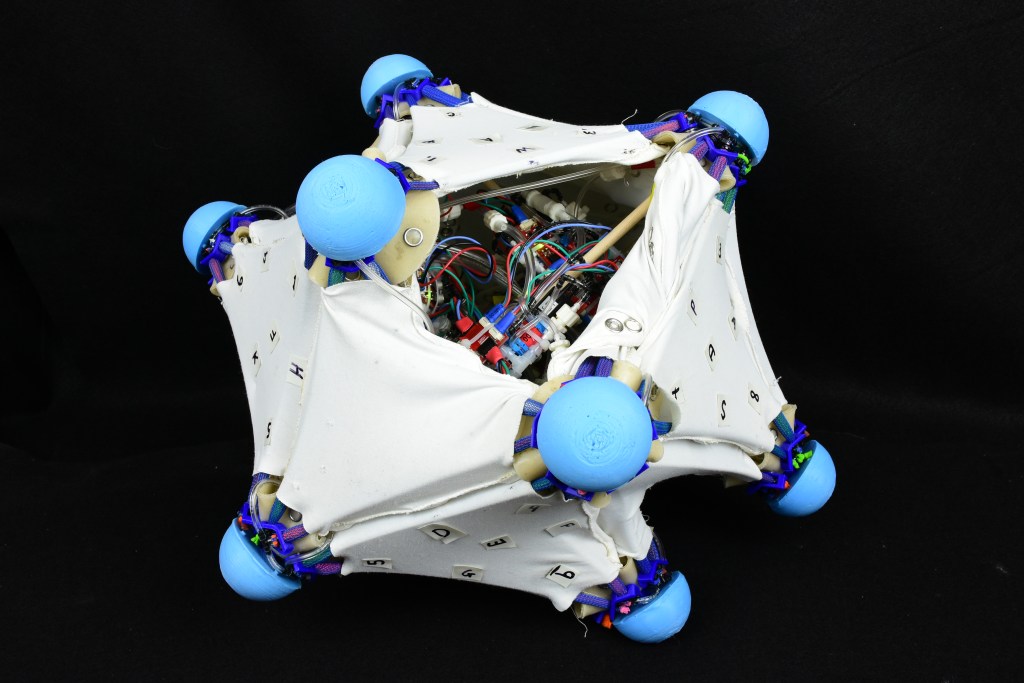
Untethered Hydraulic Tensegrity Robot
Engineering
,
Materials science
,
PCB design
,
Programming
,
Robotics
Gear Stress Solver GUI
Engineering
,
Machine design
,
Materials science
,
Modeling, analysis, and data visualization
,
Programming
Internal Stress State GUI
Engineering
,
Machine design
,
Modeling, analysis, and data visualization
,
Programming
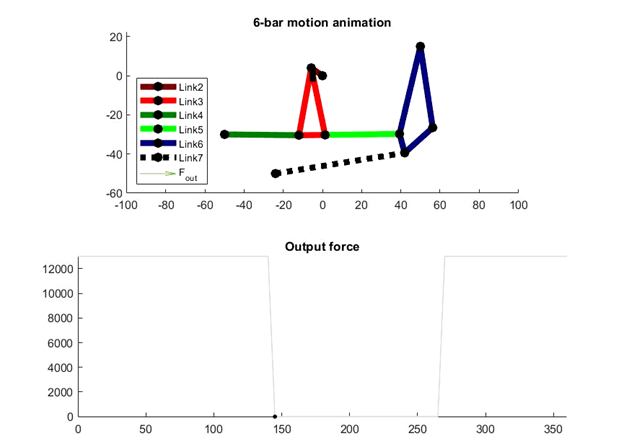
6-Bar Kinematic Simulator
Engineering
,
Machine design
,
Modeling, analysis, and data visualization
,
Programming
Pneumatic tensegrity robot
Engineering
,
Materials science
,
Modeling, analysis, and data visualization
,
PCB design
,
Programming
,
Robotics
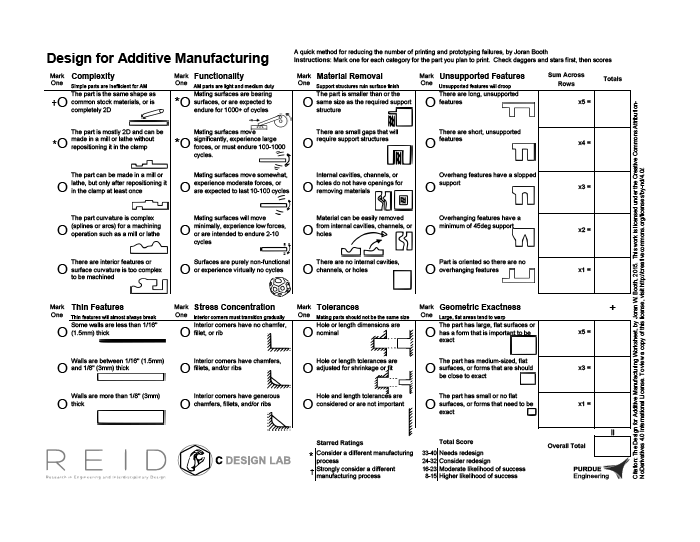
Design for 3D printing
Engineering
PCB for underwater glider
Engineering
,
PCB design
,
Programming
,
Robotics
Double Toggle Rock Crusher
Engineering
,
Machine design
,
Materials science
,
Modeling, analysis, and data visualization
,
Programming
Custom R/C receiver and battery pack
Engineering
,
PCB design
,
Robotics
Subscribe
Subscribed
Joran Booth, Ph.D. in Mech. Eng.
Sign me up
Already have a WordPress.com account?
Log in now.
Joran Booth, Ph.D. in Mech. Eng.
Subscribe
Subscribed
Sign up
Log in
Report this content
View site in Reader
Manage subscriptions
Collapse this bar